MC-Dyno
The MC-Dyno is an open project that includes both software and hardware to enable anyone to build their own motor dynamometer for testing and tuning motor-control algorithms. The project supports both high-voltage and low-voltage configurations on the dyno side, and can test virtually any electric motor on the DUT (Device-Under-Test) side.
By the way…
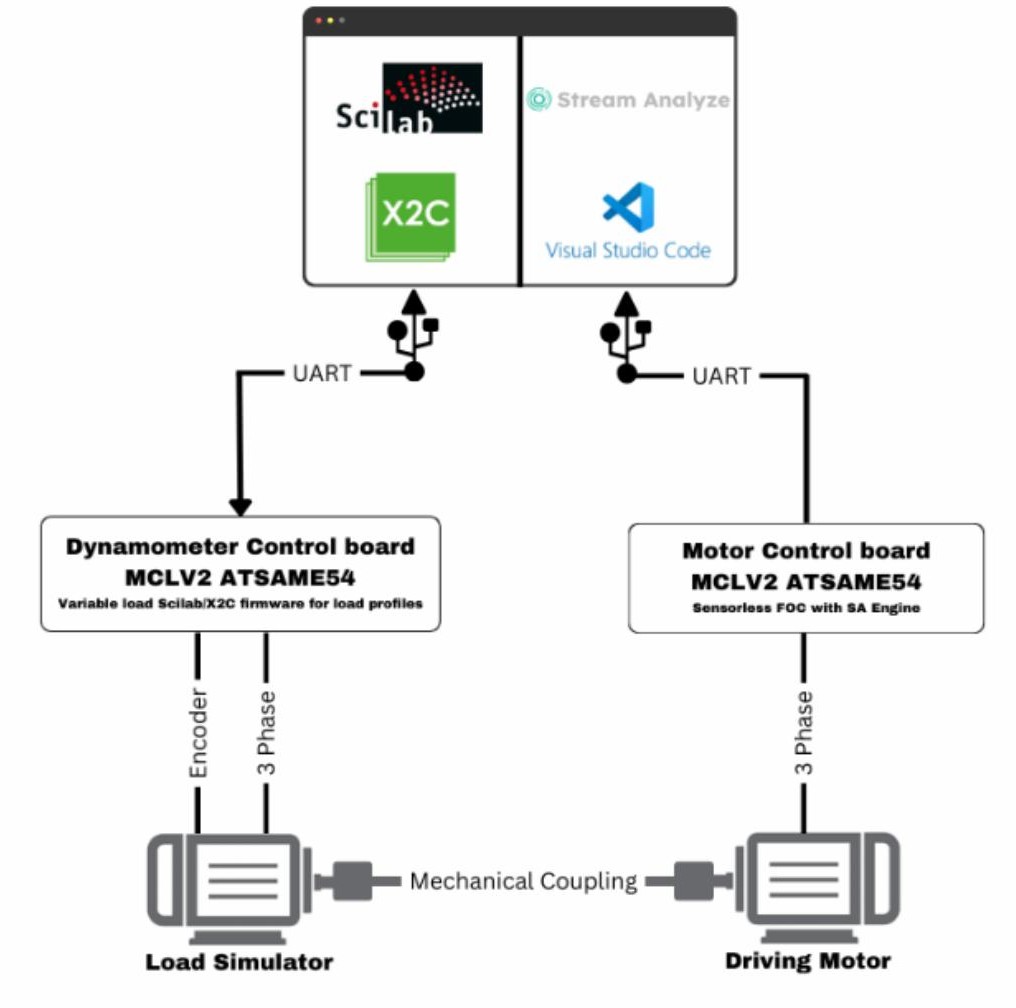
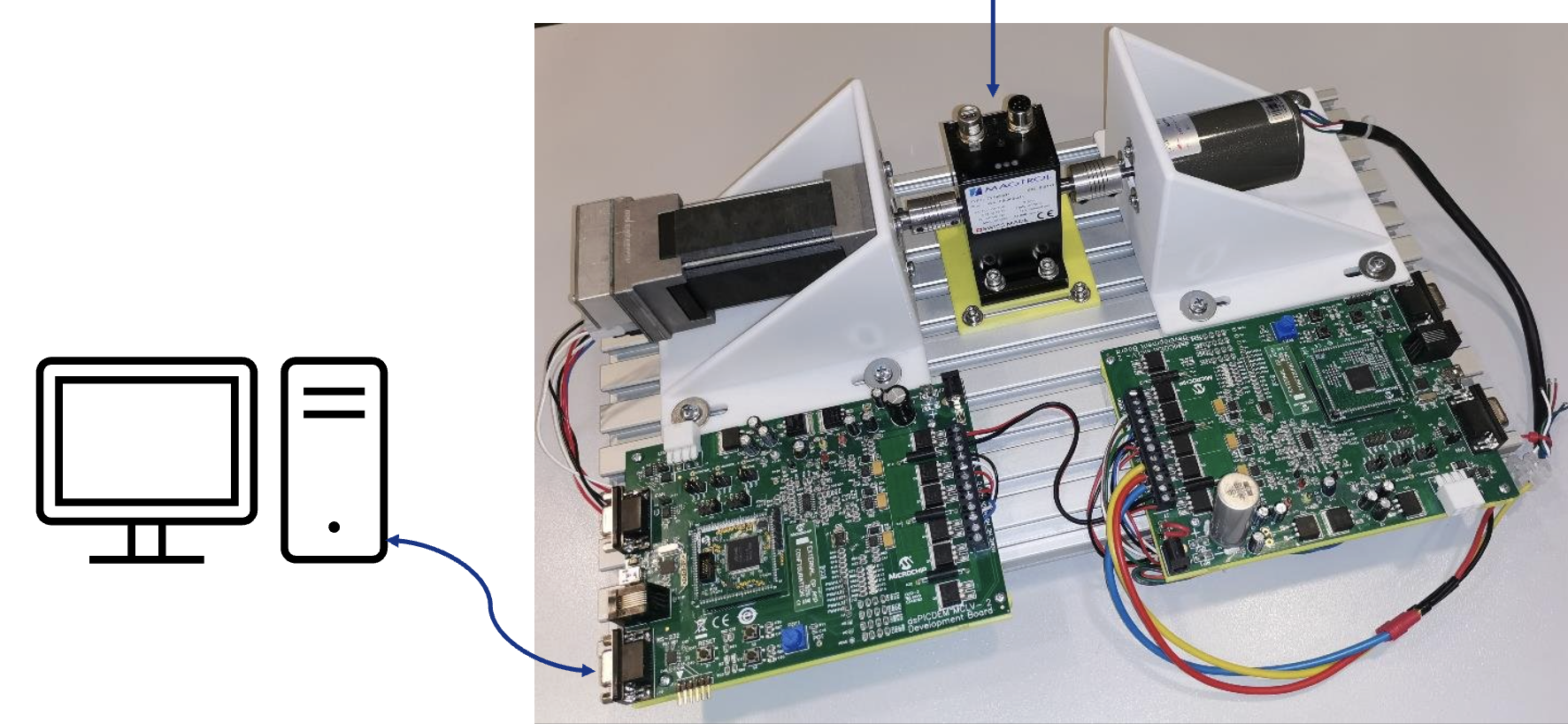
“Dyno” is short for dynamometer. In this project the dyno is implemented using a PMSM motor which must have an encoder. This motor is connected to a control board running the MC-Dyno software, and the control board, is connected to a PC running Scilab/XCOS or external an controller (for example the IGAT) for interfacing with it. In a motor-dyno setup, the motor is the device that produces mechanical power, while the dyno is the machine that absorbs mechanical power and measures the motor’s performance. Using this configuration you can apply a controllable mechanical load to the motor-under-test and observe its response (torque, speed, power, efficiency, thermal behavior, etc.). For basic characterization a dedicated torque sensor is not required. Because the dyno is “smart” (motor-as-brake), you can simulate different load profiles and dynamic conditions, enabling more meaningful testing than with simple passive loads.
Get Inspired & Build your own MC-Dyno
Here are a few example builds to spark ideas. Use MC-Dyno as a base and adapt it to your own motors and mechanics.

|

|
|
|
|
|
|
Desktop BLDC dyno for low-voltage testing |
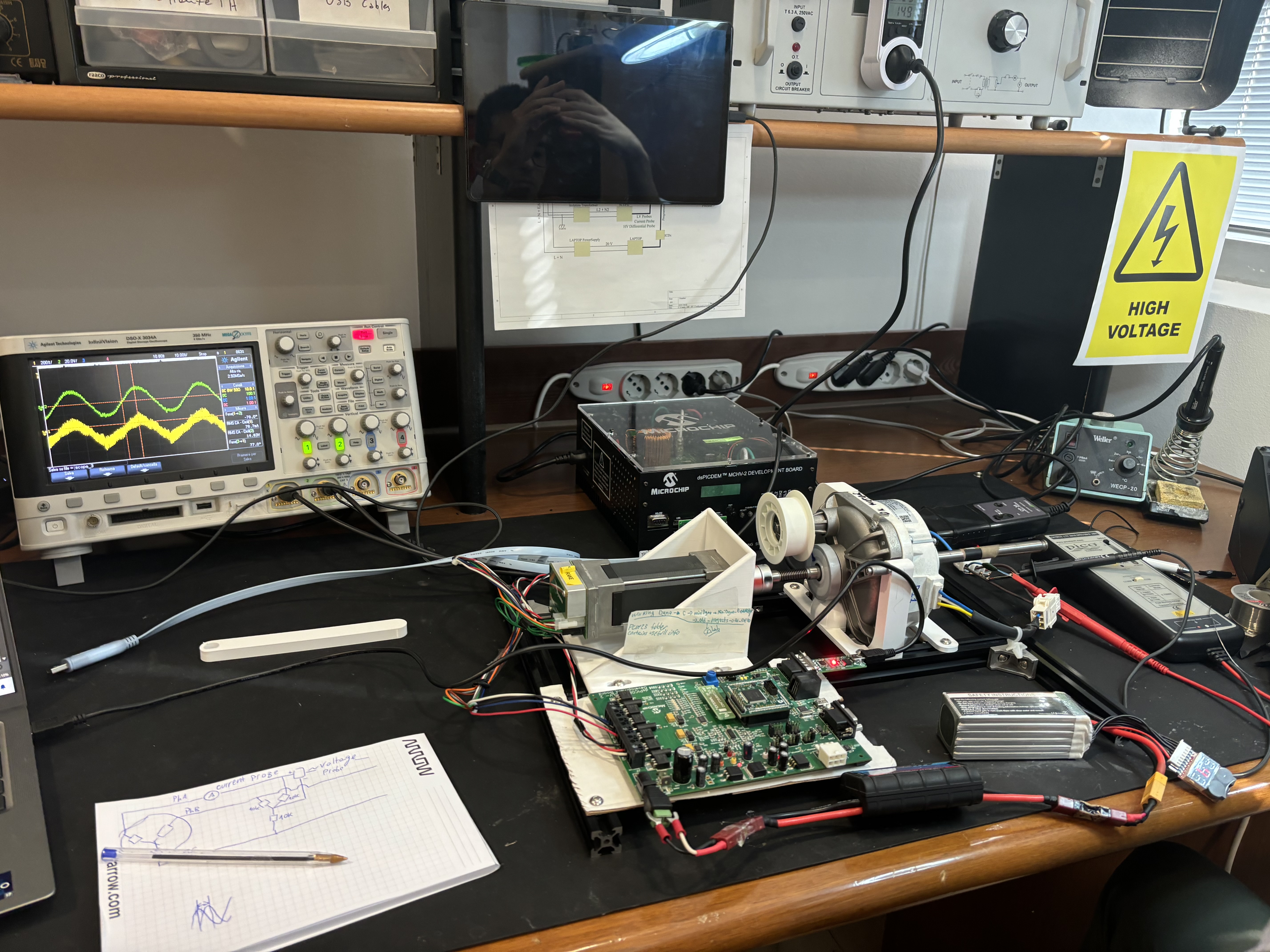
High-voltage inverter + PMSM test bench |
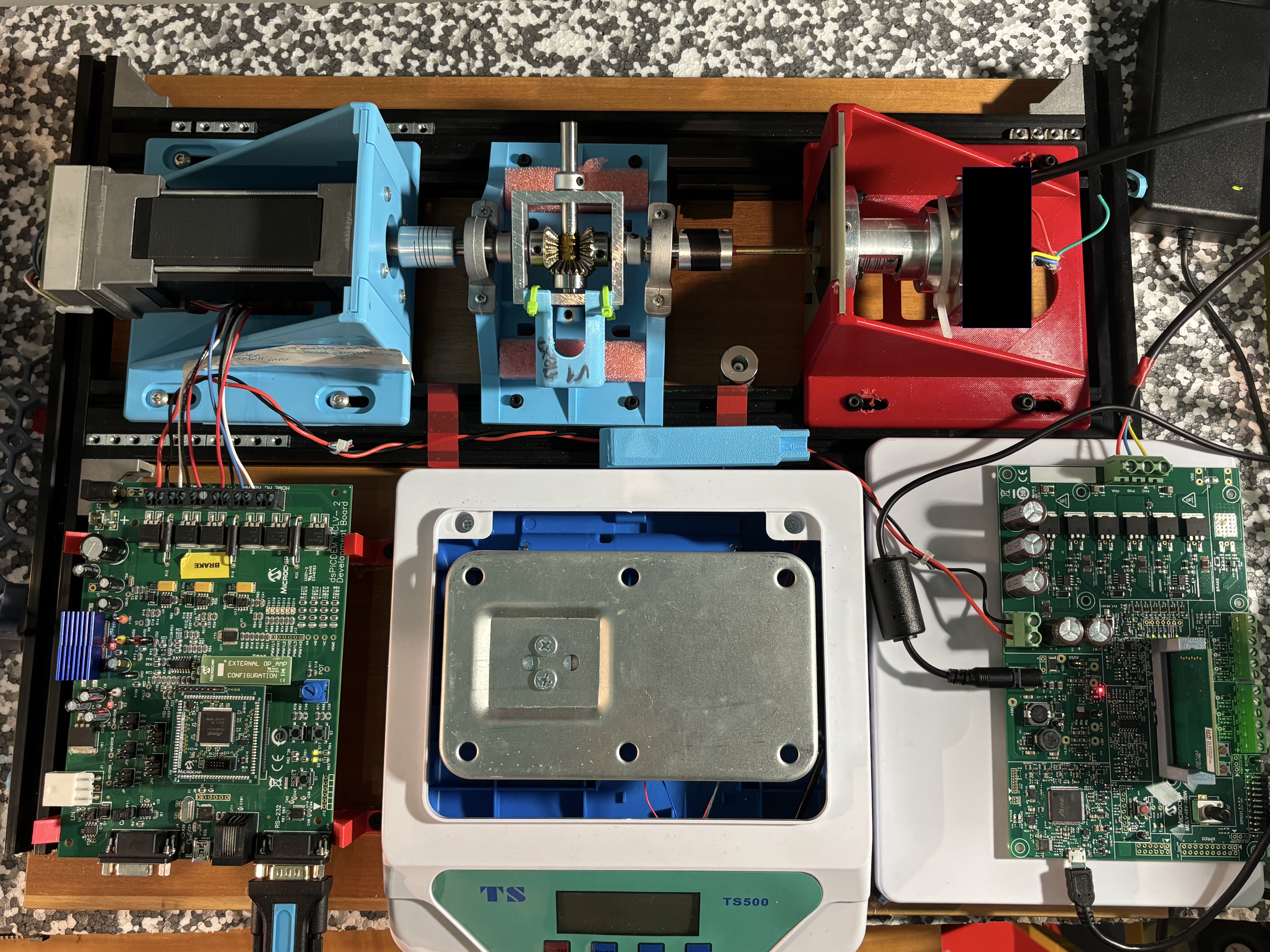
Differential coupling for cheap torque measurement |
Low Votlage Dyno but High Voltage DUT |
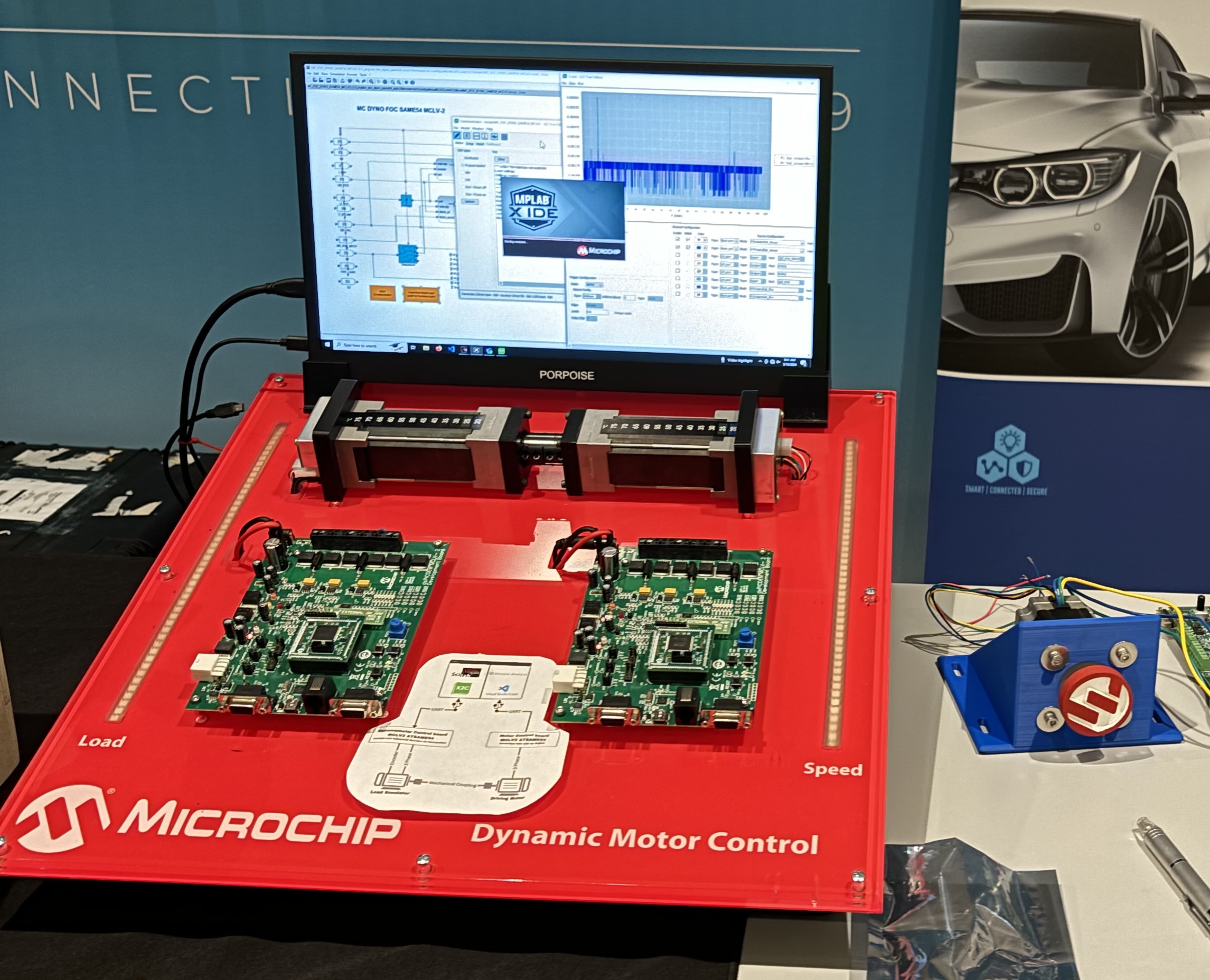
Exhibition Ready Demo |
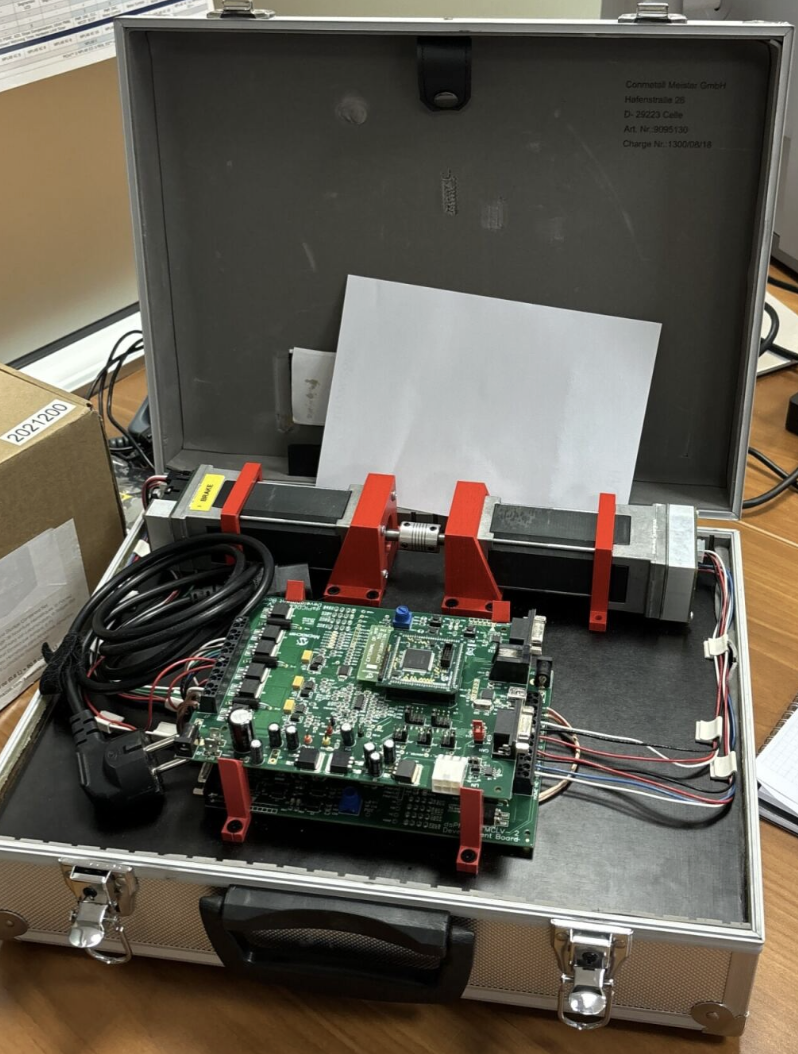
Suitcase MC-Dyno build |
Example with Torque Sensor |